Způsoby řízení otáček asynchronního motoru

V dnešní době je regulace otáček střídavých motorů pomocí frekvenčních měničů široce používána téměř ve všech průmyslových odvětvích.
V praxi se systémy řízení otáček pro třífázové motory na střídavý proud používají na základě dvou různých principů řízení:
1. U/f řízení (volt-frekvenční nebo skalární řízení);
2. Vektorové řízení.
Metody řízení používané v frekvenčních měničích pro řízení střídavých motorů
V dnešní době je regulace otáček střídavých motorů pomocí frekvenčních měničů široce používána téměř ve všech průmyslových odvětvích. Je to především díky velkým úspěchům v oblasti výkonové elektroniky a mikroprocesorové techniky, na jejichž základě byly vyvinuty frekvenční měniče. Na druhé straně sjednocení výroby frekvenčních měničů výrobci umožnilo výrazně ovlivnit jejich cenu a přimět je k jejich splacení v poměrně krátkých časových obdobích. Úspora energetických zdrojů při použití měničů pro řízení asynchronních motorů může v některých případech dosáhnout 40 % i více.
V praxi se systémy řízení otáček pro třífázové motory na střídavý proud používají na základě dvou různých principů řízení:
1. U/f řízení (volt-frekvenční nebo skalární řízení);
2. Vektorové řízení.
U/f- regulace otáček asynchronního elektrického pohonu
Skalární řízení neboli U/f řízení asynchronního motoru je změna otáček motoru ovlivňováním frekvence napětí na statoru při současné změně velikosti tohoto napětí. Při regulaci U/f působí frekvence a napětí jako dvě řídicí akce, které se obvykle regulují společně. V tomto případě je frekvence brána jako nezávislý vliv a hodnota napětí při dané frekvenci je určena na základě toho, jak by se měl měnit typ mechanických charakteristik pohonu při změně frekvence, tj. jak by se měl měnit kritický moment v závislosti na na frekvenci. Pro implementaci takového regulačního zákona je nutné zajistit stálost poměru U/f=konst, kde U je napětí na statoru a f je frekvence napětí statoru.
Při konstantní přetížitelnosti, jmenovitém účiníku a účinnosti motoru se v celém rozsahu regulace otáček prakticky nemění.
Zákony regulace U/f zahrnují zákony týkající se velikostí a frekvencí napětí napájejícího motor (U/f=konst, U/f2=konst a další). Jejich výhodou je schopnost současně ovládat skupinu elektromotorů. Skalární řízení se používá pro většinu praktických aplikací frekvenčních měničů s rozsahem regulace otáček motoru bez použití zpětnovazebního snímače až do 1:40. Skalární řídicí algoritmy neumožňují sledování a řízení točivého momentu elektromotoru, stejně jako režimu polohování. Nejúčinnější oblast použití této metody ovládání: ventilátory, čerpadla, dopravníky atd.
Vektorové ovládání
Vektorové řízení je způsob řízení synchronních a asynchronních motorů, který nejen generuje harmonické proudy a fázová napětí (skalární řízení), ale také zajišťuje řízení magnetického toku motoru. Vektorové řízení je založeno na myšlence napětí, proudů a vazeb toku jako prostorových vektorů.
Základní principy byly vyvinuty v 70. letech 20. století. V důsledku zásadního teoretického výzkumu a úspěchů v oblasti výkonové polovodičové elektroniky a mikroprocesorových systémů byly dnes vyvinuty elektrické pohony s vektorovým řízením, které jsou sériově vyráběny výrobci pohonných zařízení po celém světě.
S vektorovým řízením v asynchronním elektrickém pohonu v přechodových procesech je možné udržovat konstantní vazbu rotorového toku, na rozdíl od skalárního řízení, kde se vazba rotorového toku v přechodových procesech mění, když se mění statorové a rotorové proudy, což vede k snížení rychlosti změny elektromagnetického momentu. U pohonu s vektorovým řízením, kde může být vazba rotorového toku udržována konstantní, se elektromagnetický moment mění tak rychle, jak se mění složka statorového proudu (analogicky ke změně točivého momentu při změně proudu kotvy u stejnosměrného stroje).
S vektorovým řízením předpokládá řídicí vazba přítomnost matematického modelu nastavitelného elektrického pohonu. Režimy vektorového řízení lze klasifikovat následovně:
1. Podle přesnosti matematického modelu elektromotoru použitého v řídicím spoji:
• Použití matematického modelu bez dalších objasňujících měření parametrů elektromotoru řídicím zařízením (použijí se pouze typická data motoru zadaná uživatelem);
• Použití matematického modelu s dodatečným zpřesňujícím měřením řídicím zařízením parametrů elektromotoru, tzn. aktivní a reaktivní odpory statoru/rotoru, napětí a proud motoru.
2. Na základě přítomnosti nebo nepřítomnosti zpětné vazby rychlosti (snímač rychlosti) lze vektorové řízení rozdělit na:
• Řízení motoru bez zpětné vazby otáček – v tomto případě řídicí zařízení využívá data z matematického modelu motoru a hodnoty získané měřením proudu statoru a/nebo rotoru;
• Řízení motoru se zpětnou vazbou otáček – v tomto případě zařízení využívá nejen hodnoty získané měřením proudu statoru a/nebo rotoru elektromotoru (jako v předchozím případě), ale také údaje o otáčkách rotoru ( pozice) ze snímače, což v některých úlohách řízení umožňuje zvýšit přesnost nastavení rychlosti (polohy) elektropohonu.
Mezi základní zákony vektorového řízení patří následující:
A. Zákon zajišťující stálost vazby magnetického toku statoru ψ1 (odpovídající stálosti Evnesh /f).
b. Zákon zajišťující stálost vazby magnetického toku vzduchové mezery ψ0 (konstanta E/f);
PROTI. Zákon zajišťující stálost vazby magnetického toku rotoru ψ2 (konstanta Evnut/f).
Zákon udržování konstantní vazby statorového toku je implementován udržováním konstantního poměru emf statoru k úhlové frekvenci pole. Hlavní nevýhodou tohoto zákona je snížená přetížitelnost motoru při provozu na vysokých frekvencích. To je způsobeno zvýšením indukční reaktance statoru a následně snížením vazby toku ve vzduchové mezeře mezi statorem a rotorem, když se zvyšuje zatížení.
Udržování konstantního hlavního průtoku zvyšuje přetížitelnost motoru, ale komplikuje hardwarovou implementaci řídicího systému a vyžaduje buď změny v konstrukci stroje, nebo přítomnost speciálních senzorů.
Při udržování konstantní vazby rotorového toku nemá točivý moment motoru maximum, ale s rostoucím zatížením roste hlavní magnetický tok, což vede k saturaci magnetických obvodů a následně k nemožnosti udržet konstantní tok rotoru. vazba.
Srovnávací posouzení zákonitostí regulace otáček asynchronním elektrickým pohonem změnou frekvence napětí na statoru
Obrázek 1 ukazuje výsledky teoretických studií energetických indikátorů asynchronního motoru o výkonu Рн = 18,5 kW za různých zákonů řízení frekvence, které byly provedeny v práci V.S. Petrushin a Ph.D. A.A. Tankov „Ukazatele energie asynchronního motoru ve frekvenčním elektrickém pohonu podle různých zákonů řízení.“ Jsou tam uvedeny i výsledky experimentu provedeného při testování tohoto motoru (zákon řízení frekvence U/f = konst). Motor pracoval při zátěži s konstantním točivým momentem 30,5 Nm v rozsahu otáček 500 – 2930 ot./min.
Porovnáním získaných závislostí můžeme dojít k závěru, že v zóně nízké rychlosti je při použití regulačních zákonů druhé skupiny účinnost o 7-21 % vyšší a účiník o 3-7 % nižší. S rostoucí rychlostí se rozdíly zmenšují.
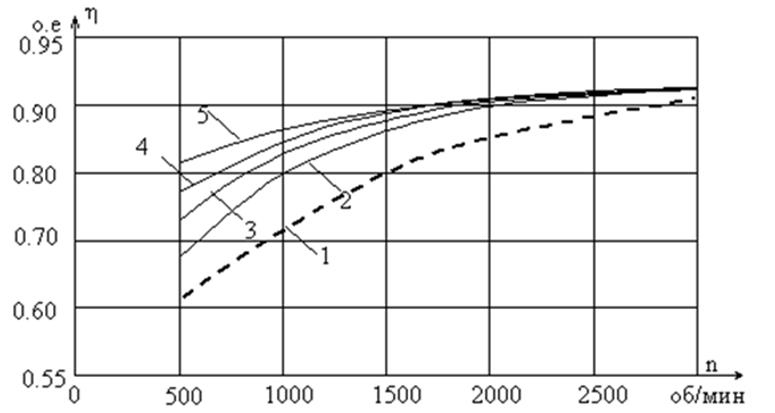
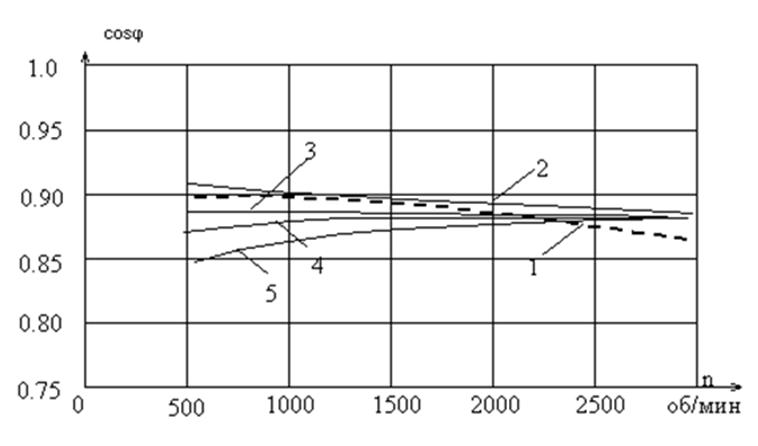
Obr.1. Změna účinnosti (a) a cosφ (b) v kontrolním rozsahu: 1 – experimentální závislosti; vypočítané závislosti pro různé regulační zákony: 2 – U/f = konst, 3 – Evnesh /f = konst, 4 – E/f= konst, 5 – Evnesh /f= konst.
Zákony vektorového řízení tedy zajišťují nejen lepší ovládání elektrického pohonu ve statickém a dynamickém režimu, ale také zvýšení účinnosti motoru a tím i celého pohonu. Avšak všechny zákony udržující konstantní vazbu toku mají své určité nevýhody.
Společnou nevýhodou zákonů udržujících konstantní vazbu toku je: nízká spolehlivost díky přítomnosti snímačů zabudovaných v motoru a ztráty v oceli, když motor pracuje se zatěžovacím momentem menším, než je jmenovitý. Tyto ztráty jsou způsobeny potřebou udržovat konstantní vazbu jmenovitého toku v různých provozních režimech.
Účinnost motoru lze výrazně zvýšit regulací magnetického toku statoru (rotoru) v závislosti na velikosti zatěžovacího momentu (skluzu). Nevýhodou takového řízení jsou nízké dynamické charakteristiky pohonu, způsobené velkou hodnotou časové konstanty rotoru, díky které se magnetický tok stroje obnovuje s určitým zpožděním, a složitost technického provedení řízení. systém.
V praxi se skupina zákonů s konstantním magnetickým tokem rozšířila pro dynamické elektrické pohony pracující s konstantním momentem odporu na hřídeli a s častými aplikacemi rázového zatížení. Zatímco skupina zákonů s regulací magnetického toku v závislosti na zatížení hřídele se používá pro nízkodynamické elektrické pohony a pro pohony se zátěží „ventilátoru“.

Asynchronní střídavé motory jsou nejpoužívanějšími elektromotory absolutně ve všech ekonomických odvětvích. Mezi jejich přednosti patří konstrukční jednoduchost a nízká cena. Regulace otáček asynchronního motoru má v tomto případě nemalý význam. Existující metody jsou uvedeny níže.
Podle blokového schématu lze otáčky elektromotoru řídit ve dvou směrech, tedy změnou veličin:
- rychlost elektromagnetického pole statoru;
- prokluz motoru.
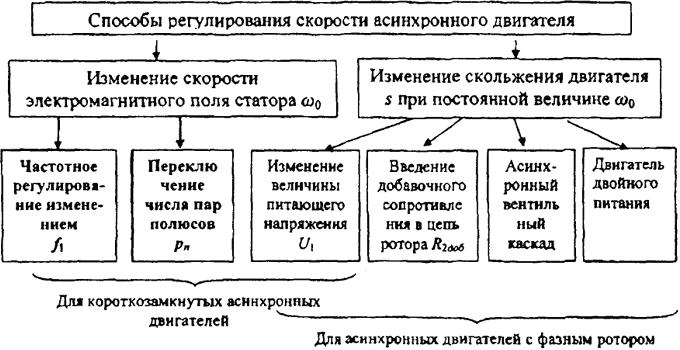
První možnost korekce, používaná u modelů s rotorem nakrátko, se provádí změnou:
- frekvence,
- počet párů pólů,
- Napětí.
Druhá možnost, používaná pro modifikaci s vinutým rotorem, je založena na:
- změna napájecího napětí;
- připojení odporového prvku k obvodu rotoru;
- použití ventilové kaskády;
- použití duálního napájení.
Díky vývoji technologie přeměny výkonu se v současnosti ve velkém vyrábějí všechny druhy frekvenčních měničů, což předurčilo aktivní použití frekvenčních měničů. Podívejme se na nejběžnější metody.
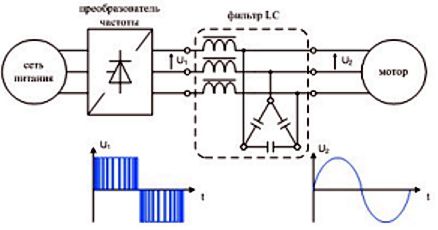
Regulace frekvence
Ještě před deseti lety byl v obchodním řetězci malý počet regulátorů rychlosti ED. Důvodem bylo to, že ještě nebyly vyrobeny levné vysokonapěťové výkonové tranzistory a moduly.
Frekvenční převod je dnes nejběžnější metodou regulace otáček motorů. Třífázové frekvenční měniče jsou vytvořeny pro řízení 3fázových elektromotorů.
Jednofázové motory jsou řízeny:
- speciální jednofázové frekvenční měniče;
- 3-fázové frekvenční měniče s eliminací kondenzátoru.
Schémata regulátorů otáček pro asynchronní motory
U motorů používaných pro každodenní použití můžete snadno provést potřebné výpočty a sestavit zařízení na polovodičovém čipu vlastníma rukama. Níže je uveden příklad obvodu ovladače motoru. Toto schéma umožňuje řídit parametry pohonného systému, udržovat náklady na údržbu a snížit spotřebu elektrické energie na polovinu.
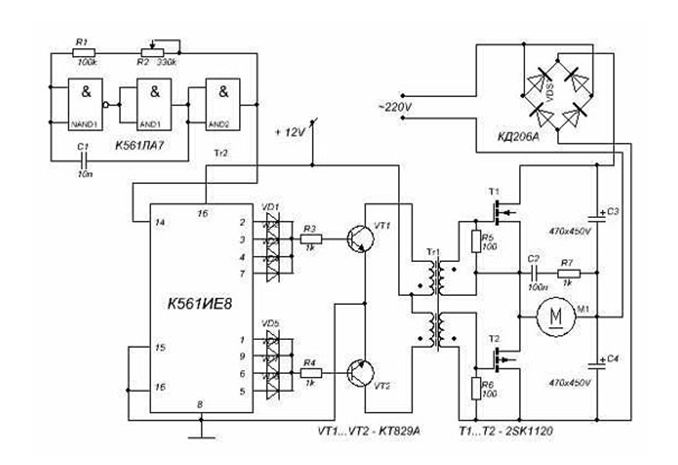
Schéma EM regulátoru otáček pro každodenní potřeby je značně zjednodušeno, pokud je použit tzv. triak.
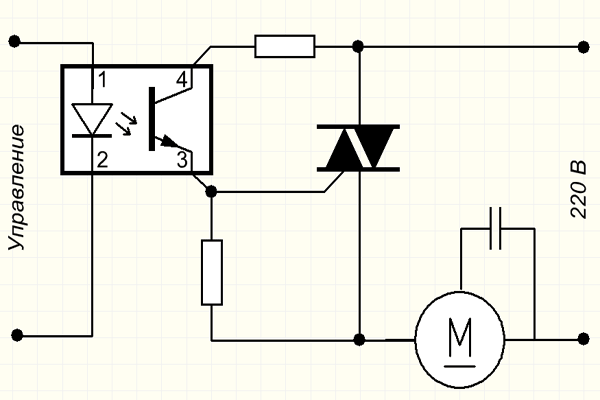
Rychlost otáčení motoru je regulována pomocí potenciometru, který určuje fázi vstupního impulsního signálu, který otevírá triak. Obrázek ukazuje, že dva tyristory zapojené paralelně zády k sobě jsou použity jako spínače. Tyristorový regulátor otáček ED 220 V se často používá k regulaci zátěží, jako jsou stmívače, ventilátory a topná zařízení. Technické ukazatele a provozní účinnost pohonného zařízení závisí na rychlosti otáčení asynchronního motoru.
Závěr
Technologický trh dnes nabízí širokou škálu regulátorů a frekvenčních měničů pro asynchronní střídavé motory.
Řízení způsobu změny frekvence v tuto chvíli je nejoptimálnější metodou, protože umožňuje plynule regulovat rychlost asynchronního motoru v širokém rozsahu, bez významných ztrát a snížení schopností přetížení.
Na základě výpočtů však můžete nezávisle sestavit jednoduché a efektivní zařízení pro regulaci rychlosti otáčení jednofázových elektromotorů pomocí tyristorů.