Automatická regulace napětí a jalového výkonu generátorů
Blog lodního elektrotechnika. Elektronika, elektromechanika a automatizace na lodích. Školení a praxe. Pomáhat studentům a odborníkům.
Pokud se vám některé fotky/obrázky/kresby nenačítají, pak doporučujeme využít služby VPN!
11.11.2015
Automatické systémy regulace napětí pro generátory s korektorem napětí
Při provozu závisí napětí synchronních generátorů na zatěžovacím proudu, účiníku, rychlosti otáčení a odporu vinutí všech prvků budící soustavy. Změna odporu vinutí při provozu budícího systému závisí na teplotě ohřevu. Pokud zařízení pro slučování fází automaticky regulují napětí na základě účinků zatěžovacího proudu a účiníku, pak se použijí další faktory, které berou v úvahu další faktory ovlivňující napětí generátoru. napěťové korektory.
Automatický bezkontaktní regulátor napětí UBK-M udržuje konstantní napětí synchronních generátorů v provozních režimech lodní elektrárny.
Je určen pro lodní synchronní generátory se strojními budiči, pracuje na principu vysokorychlostního řízeného slučování fází s napěťovým korektorem.
Regulátor UBK-M (obr. 1) se skládá z fázového slučovacího transformátoru T1 a proudového transformátoru T2 s usměrňovačem U2, určeným k předpětí zesilovače A a napěťového korektoru T3, U3, U4. Transformátor T1 má dvě primární proudová vinutí L1 a L2, připojená ke dvěma fázím generátoru G2 (s odpovídajícím geometrickým rozdílem proudů v těchto vinutích), a primární napěťové vinutí L3, které je napájeno ze síťového napětí generátoru přes induktor L4 s nastavitelnou vzduchovou mezerou a rezistorem R3 . Sekundární vinutí transformátoru L5 přes usměrňovač U1 napájí budicí vinutí budiče LG1.

Rýže. 1. Schematické schéma regulátoru napětí UBK-M
Napěťový korektor sestává z přístrojového transformátoru T3 s frekvenčním kompenzačním obvodem a magnetickým zesilovačem A, působícím na předpětí L6 transformátoru T1.
Výstupní proud transformátoru T1 je řízen změnou jeho předpětí, které závisí na proudu řídícího vinutí L6. Například s rostoucím předpětím se snižuje indukčnost vinutí transformátoru a zvyšuje se výstupní proud. Transformátor T1 tedy zajišťuje řízené skládání fází generátoru, tj. když se zatěžovací proud zvyšuje nebo snižuje účiník, zvyšuje buzení generátoru.
Mezi výhody regulátorů UBK-M patří větší spolehlivost díky absenci pohyblivých mechanických zařízení a kontaktů. Regulátory mají vysokou citlivost a zajišťují stabilní paralelní provoz generátorů a také maximální vybuzení při výrazných poklesech napětí na sběrnicích elektrárny.
Hlavním rysem systému automatických regulátorů napětí UBK-M, RNA-65, stejně jako RUN je možnost jejich použití pouze v přítomnosti budiče, což výrazně snižuje spolehlivost instalace a rychlost regulace. systém, výrazně zvyšuje hmotnost a celkové rozměry.
Generátory synchronního třífázového proudu typu MSS, MSC a GSS mají systém statického samobuzení automatické regulace napětí. Pracuje na principu slučování fází pomocí třívinutého třítyčového transformátoru a výkonových polovodičových usměrňovačů (obr. 2). Hlavní prvky systému: G – synchronní generátor, VI-V6 – usměrňovače, C1- SZ – kondenzátory, T – fázový slučovací transformátor, který má tři vinutí: L1, zapojený do série se statorovým vinutím generátoru; L2, zapojený do série s kondenzátory pro napětí generátoru, a L3, který napájí budicí vinutí generátoru.
Princip samobuzení synchronních generátorů, stejně jako stejnosměrné generátory, je založen na použití zbytkové magnetické pole. Protože odpor usměrňovačů při malých proudech je mnohem větší než při jmenovitém proudu, je pro počáteční vybuzení generátoru nutné, aby nap. d.s. indukovaná ve vinutí byla poměrně velká. Toho je dosaženo zapojením kondenzátorů C do série s vinutím L2.
Reaktance vinutí a kondenzátorů je volena tak, že při spuštění generátoru, když frekvence proudu ve vinutí L2 dosáhne 80% jmenovité hodnoty, dojde v obvodu k napěťové rezonanci. Přestože tedy napětí indukované zbytkovým polem bude zanedbatelné, vinutím L2 bude procházet velký proud. V důsledku toho se ve vinutí L3 indukuje dostatečné e. d.s., a generátor se sám vzbudí.

Rýže. 2. Schematické schéma samobuzení a automatické regulace napětí synchronního generátoru
Když generátor běží, např. d.s indukované ve vinutí L3, a tedy i proud v budícím vinutí generátoru, závisí na výsledné magnetizační síle vytvářené vinutími L1 a L2. Tato vinutí jsou navržena a zapojena tak, že při zvýšení zatěžovacího proudu generátorů nebo při snížení účiníku (cos f) se výsledná magnetizační síla a e zvyšuje. d.s., indukované ve vinutí L3. V důsledku toho se zvyšuje budicí proud a napětí generátoru. Pro zvýšení přesnosti řízení se do takových systémů skládání fází zavádí napěťový korektor.
Uvažovaný systém umožňuje snížit hmotnost a celkové rozměry lodních dieselagregátů a také poklesy napětí v lodních elektrických sítích.
Systémy samobuzení generátorů mají také zařízení, které zajišťuje rovnoměrné rozložení zátěže při paralelním provozu generátorů. Takové systémy se vyznačují vysokou rychlostí, které je dosaženo vyloučením budiče z řídicího systému.
Systémy automatické regulace napětí s tyristory
Na nových lodích platí systémy automatické regulace napětí s tyristory. Používají se různá obvodová řešení pro systémy regulace napětí pomocí tyristorů. Regulace na základě odchylky napětí generátoru se provádí porovnáním regulovaného a referenčního napětí a vysláním řídicího signálu do tyristorového řídicího systému. Referenční napětí se nastavuje pomocí zenerových diod. Blokové schéma tyristorového regulátoru napětí (obr. 3) má tyto prvky: IB – měřicí jednotka; FI – tvarovač pulsů; BP – napájení; T – transformátor; V – řídicí tyristor. Výstupní signál měřicí jednotky je převeden na tyristorový řídicí signál s následnou regulací proudu budícího vinutí generátoru.

Rýže. 3. Blokové schéma tyristorového regulátoru napětí
Používá se v lodních generátorech amplitudově-fázový slučovací systém s tyristorem řízeným napěťovým korektorem. Použití korekce tyristorového napětí zvyšuje rychlost a citlivost systému automatického řízení napětí lodních generátorů.
V současné době jsou v lodních elektrárnách instalovány bezkomutátorové synchronní generátory typu OS a také typu S. Pokud u generátorů typu MSK, GSS, MSS se statickými systémy automatického řízení napětí je regulovaný budicí proud přiváděn do budícího vinutí budicího vinutí. pólů rotačního induktoru (rotoru) pomocí kartáčovaných kluzných kontaktů, pak u bezkomutátorových generátorů vzniká stejnosměrný proud v rotoru díky indukovanému proudu v samotném rotoru. Princip automatické regulace napětí generátorů typu OS, S je na Obr. 4.
Pomocí systému automatické regulace napětí AVR je v závislosti na zatížení generátoru G1 regulován stejnosměrný proud ve vinutí LG1.2 instalovaném na speciálních pólech statoru. Když se rotor otáčí, magnetický tok vytvářený vinutím LG1.2 indukuje střídavý proud v třífázovém vinutí LG1.3. Usměrněný proud v rotoru pomocí usměrňovače V vytváří hlavní magnetický tok synchronního generátoru pomocí budícího vinutí LG1.1. Samobuzení generátorů typů OS, S se provádí obdobně jako samobuzení generátorů typů MSK, MSS, GSS s přítomností kartáčového mechanismu pro přenos stejnosměrného budícího proudu na rotující část stroje.
Elektrické systémy na moderních lodích obecně kombinují několik různých typů generátorů a velký počet spotřebitelů elektřiny různého výkonu a účelu.
Mnoho lodních spotřebitelů potřebuje nepřetržité napájení a vysoce kvalitní dodávku elektřiny, která je u stejnosměrných instalací určována konstantním napětím au střídavých instalací konstantním napětím a frekvencí.
Ve srovnání s instalacemi na pevnině je výkon lodní elektrárny malý a jednotliví spotřebitelé elektřiny jsou výkonově srovnatelní s generátory lodní elektrárny. Lodní elektrické napájecí systémy se navíc vyznačují náhlými změnami zatížení v různých provozních režimech lodi, častým zapínáním a vypínáním spotřebičů, což vede ke kolísání napětí a frekvence lodní elektrické sítě. Aby se však zajistil normální provoz spotřebitelů elektřiny, napětí by se nemělo ve všech provozních režimech systému elektrické energie měnit nad povolené limity.
Ve stejnosměrných instalacích je nejjednodušším a nejběžnějším způsobem udržování konstantního napětí v síti skládání generátorů, to znamená použití sériového budícího vinutí zapojeného v souladu s paralelním nebo nezávislým budicím vinutím. S rostoucím zatěžovacím proudem generátoru se zvětšuje magnetizační síla tohoto vinutí a tím se kompenzuje demagnetizační účinek reakce kotvy a úbytek napětí v odporech obvodu kotvy.
Sériové vinutí u generátorů se smíšeným buzením zajišťuje kromě regulace napětí také boost buzení, tedy rychlé obnovení napětí generátoru po zkratu nebo rázu značné zátěže.
Pokud je potřeba přesněji udržovat konstantní napětí ve stejnosměrné síti, používají se automatické řídicí systémy, které působí na odchylky napětí a pro napájení budicích obvodů generátoru využívají zesilovače elektrického stroje EMU, magnetické zesilovače MU a polovodičové součástky.
Hlavními důvody změn napětí synchronních generátorů jsou demagnetizační účinek reakce statoru a indukční pokles napětí, ke kterým dochází při změně zátěže (zejména při spouštění asynchronních motorů velkých výkonů úměrných výkonu generátorů), neboť stejně jako při jakékoli změně hodnoty účiníku (cos
Proto Pravidla rejstříku SSSR stanoví povinné používání automatického systému regulace napětí (AVR) pro lodní generátory.
Kromě toho automatické regulátory napětí (jako u instalací na stejnosměrný proud) vynucují buzení synchronních generátorů při nouzových poklesech napětí v elektrickém energetickém systému lodi. To zvyšuje stabilitu paralelního provozu generátorových soustrojí, urychluje obnovu hodnoty jmenovitého napětí a zvyšuje limit výkonu přenášeného generátory do lodní sítě.
Základem pro vývoj a výběr systému AVR jsou požadavky na kvalitu regulace, provozní a další výkonnostní ukazatele, z nichž hlavní jsou:
1) čas prvního dosažení jmenovitého napětí při zatížení;
2) povaha změny napětí, dokud není dosaženo hodnoty v ustáleném stavu;
3) trvání procesu přechodu;
4) statická chyba, určená rozdílem napětí naprázdno a při jmenovité zátěži v ustáleném stavu;
5) životnost a spolehlivost systému;
6) jednoduchost a snadná údržba;
7) hmotnost a rozměry.
Na principu činnosti existují tři typy systémů AVR: s regulací na základě odchylky napětí generátoru; s regulací poruchou (zátěží) a s kombinovanou regulací odchylkou napětí a poruchou.
Regulaci na základě odchylky napětí provádí systém AVR pomocí uhlíkových regulátorů napětí (CVR), které jsou na lodích v provozu hojně využívány a na nově stavěné se vůbec neinstalují.
To je způsobeno jejich nevýhodami, které jsou následující:
a) uhlíkové odpory jsou zničeny vibracemi a otřesy nádoby, v důsledku čehož regulátory nemohou zajistit spolehlivý provoz zařízení;
b) RUN se vyznačují nedostatečnou rychlostí a velkou mrtvou zónou;
c) regulátory nemohou poskytnout potřebné zvýšení buzení, protože odpor uhlíkových sloupců je i při plné kompresi značný.
Systémy AVR řízené rušením se nazývají systémy skládání. Princip skládání spočívá v tom, že zvýšení zátěžového proudu generátoru je převedeno na signál pro zvýšení jeho buzení. Na rozdíl od strojů na stejnosměrný proud může být slučování pro synchronní generátory proudové a amplitudové fáze (nebo fáze).
Skládání proudu umožňuje regulaci proudovým modulem.
Když zapnete dodatečné zatížení generátoru, napětí v síti se sníží a proud v lineárních vodičích A, B a C se zvýší, což způsobí odpovídající zvýšení proudu v sekundárním vinutí proudu. transformátoru CT a nakonec v nezávislém budicím vinutí budiče. To povede ke zvýšení magnetického toku pólů budiče B a následně ke zvýšení napětí na jeho svorkách. Zvýšené napětí v obvodu budícího vinutí generátoru OVG vytvoří dodatečný proud ve vinutí a magnetický tok generátoru G, který při nové zvýšené zátěži obnoví předchozí napětí v síti.
Touha získat systém, který poskytuje vyšší přesnost řízení, byla důvodem pro vytvoření systému skládání fází s korekcí napětí. Korektor zajišťuje regulaci na základě odchylky napětí a zohledňuje vliv na hodnotu napětí změn rychlosti otáčení primárního motoru, teploty vinutí a dalších vedlejších faktorů.
Systém, ve kterém se regulační vliv na synchronní generátor provádí přes budič, se nazývá nepřímý slučovací systém. U synchronních generátorů se samobuzením není žádný budič a regulační účinek se provádí přímo na budicím vinutí generátoru. Takové systémy se nazývají přímé slučovací systémy.
Z uvažovaných systémů AVR jsou nejúčinnější systémy s kombinovanou regulací. Poskytují skládání amplitudy a fáze a korekci napětí. Taková regulace se provádí pomocí regulátoru typu UBK (univerzální vysokorychlostní kompaundování), statického systému samobuzení atd.
Slučovací systémy s regulátorem typu UBK se vyznačují malou statickou chybou, výrazným zrychlením budicího proudu při zkratech, citlivostí a schopností zajistit stabilní paralelní provoz generátorů. Tyto systémy jsou však zpravidla systémy nepřímého složení a přítomnost budiče v nich snižuje výkon a spolehlivost a také zvyšuje hmotnost a rozměry celé instalace jako celku. Proto se v současné době používají především pouze pro vysokovýkonové generátory.
V posledních letech se v lodních instalacích s generátory řad MCC, MSK a GMS téměř výhradně používají statické samobuzení s přímým slučováním. Na Obr. 2 obvod zajišťuje samobuzení a regulaci napětí generátorů řady MSK na základě rušení a odchylky napětí. Řízené skládání fází (regulace rušení) se provádí pomocí univerzálního transformátoru s magnetizací UTP a korekce napětí se provádí pomocí třífázového měřicího transformátoru TI a proudového transformátoru.
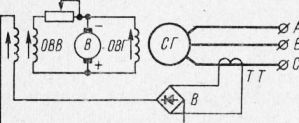
Rýže. 1. Schematické schéma současného systému skládání.
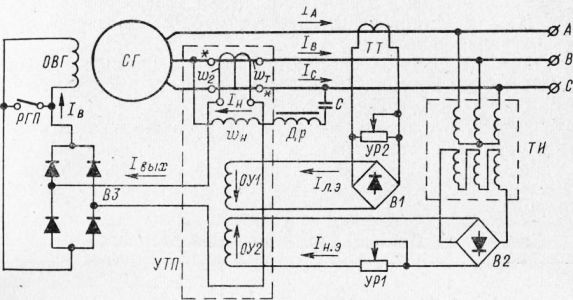
Rýže. 2. Statický systém samobuzení a automatické regulace napětí synchronních generátorů.
Transformátor má tři primární vinutí: dvě proudová vinutí, připojená na geometrický rozdíl fázových proudů (začátky vinutí jsou označeny hvězdičkami) a napěťové vinutí wH, připojené k napětí mezi těmito fázemi. Obvod napěťového vinutí obsahuje saturační tlumivku, která umožňuje skládání fází, a kondenzátorovou banku, která zlepšuje podmínky pro samobuzení generátoru.
se prakticky nemění. Zároveň změna napětí generátoru způsobí prudkou změnu výstupního proudu a proudu. ve vinutí. V důsledku toho se se změnou napětí generátoru mění předpětí a výstupní proud. To způsobí odpovídající změnu budícího proudu a přesnější vyrovnání napětí sítě, na které generátor pracuje.
K samobuzení synchronního generátoru dochází v důsledku zbytkového magnetismu železa rotoru. Nastavovací reostat mění nastavení napětí generátoru v rozmezí ±10 % a nastavovací reostat UR2 mění regulaci napětí.
Statické systémy samobuzení s přímým slučováním mají dobrý výkon a vysokou zesilovací schopnost, umožňují snížit hmotnost a rozměry generátoru díky absenci budiče a také zvyšují spolehlivost celé instalace.