Směr otáčení elektromotoru: podrobná analýza a metody změny
Směr otáčení elektromotoru: podrobná analýza a metody změny
Základy směru otáčení elektromotorů
Elektromotory jsou základními součástmi průmyslových zařízení a domácích spotřebičů. Fungují na základě interakce magnetických polí, která vytvářejí točivý moment. Pochopení principů, které určují směr otáčení, je zásadní pro správný provoz a údržbu elektromotorů.
Co určuje směr otáčení kotvy elektromotoru?
Směr otáčení kotvy motoru je určen několika základními faktory, včetně konstrukce motoru a schématu zapojení. Podívejme se na ně podrobněji.
Fyzikální principy
Základní princip činnosti elektromotoru je založen na působení Lorentzovy síly na vodič s proudem v magnetickém poli. Směr této síly, a tedy i směr otáčení kotvy, je určen pravidlem levé ruky. Podle tohoto pravidla, pokud umístíte levou ruku tak, aby siločáry magnetického pole vstupovaly do dlaně a čtyři natažené prsty směřovaly ve směru proudu ve vodiči, pak ohnutý palec bude směřovat ve směru síly působící na vodič.
- F — síla působící na vodič (N)
- B — magnetická indukce (T)
- I — síla proudu (A)
- L — aktivní délka vodiče (m)
- α je úhel mezi směrem proudu a vektorem magnetické indukce
Konstrukční vlastnosti motorů
V závislosti na typu elektromotoru může být směr otáčení kotvy určen různými faktory:
| typ motoru | Faktory určující směr otáčení |
|---|---|
| Asynchronní třífázový | Pořadí připojení fází k vinutím statoru |
| Asynchronní jednofázový | Vzájemné uspořádání a zapojení pracovního a spouštěcího vinutí |
| DC motor | Polarita připojení kotvy a budicího vinutí |
| Krokový motor | Sekvence impulzního napájení vinutí |
| Synchronní motor | Fázová sekvence |
Metody změny směru otáčení
Existuje několik způsobů, jak změnit směr otáčení elektromotoru. Volba konkrétní metody závisí na typu motoru, jeho konstrukci a oblasti použití.
Jak změnit otáčení elektromotoru na 220 voltů
U jednofázových střídavých motorů napájených ze sítě 220 V je směr otáčení určen vzájemnou polohou pracovního a spouštěcího vinutí. Pro změnu směru otáčení takového motoru je nutné změnit zapojení jednoho z vinutí.
Schéma zapojení jednofázového motoru 220V: Původní schéma: Po úpravě: L ─┬─ Pracovní výměna ─┐ L ─┬─ Pracovní výměna ─┐ │ │ │ │ │ └─ Počáteční výměna ┘ └─ Počáteční výměna ┘ │ │ N ───────────────────┘ N ───────────────────┘ Pro obrácení směru: prohoďte začátek a konec POUZE spouštěcího vinutí.
Je důležité, aby se: Před změnou směru otáčení elektromotoru na 220 voltů je nutné obvod zcela odpojit od napětí a pomocí vhodných měřicích přístrojů se ujistit, že v něm není žádné napětí.
Praktický příklad reverzace jednofázového motoru
Podívejme se na podrobné pokyny, jak změnit směr otáčení elektromotoru běžícího v síti 220 voltů:
- Vypněte motor a ujistěte se, že není pod napětím.
- Vyhledejte svorky spouštěcího vinutí (obvykle jsou označeny jako „P1“ a „P2“ nebo mohou mít jiné označení v závislosti na výrobci)
- Prohoďte připojení vodičů spouštěcího vinutí
- Zkontrolujte všechna připojení a izolaci
- Zapněte napájení a zkontrolujte směr otáčení
Reverzační třífázové elektromotory
U třífázových asynchronních motorů je změna směru otáčení mnohem snazší. Jak reverzovat 380voltový elektromotor? Stačí prohodit libovolné dvě napájecí fáze.
Schéma zapojení třífázového motoru: Původní schéma: Po úpravě: L1 ──── U L1 ──── U L2 ──── V → L3 ──── V L3 ──── W L2 ──── W nebo L1 ──── U L2 ──── U L2 ──── V → L1 ──── V L3 ──── W L3 ──── W
Reverzní obvod s magnetickým spouštěčem
Průmyslové instalace často vyžadují schopnost rychlé změny směru otáčení. Jak provést reverzaci na elektromotoru 220 nebo 380 voltů v takových případech? Nejběžnějším řešením je použití reverzibilního obvodu se dvěma magnetickými spouštěči.
Reverzibilní magnetický spouštěč umožňuje změnit směr otáčení elektromotoru stisknutím příslušného tlačítka. Toto řešení zajišťuje nejen snadné ovládání, ale také bezpečnost, protože eliminuje možnost současné aktivace obou směrů otáčení v důsledku mechanických a elektrických blokování.
Elektronické metody reverzace
Moderní technologie nabízejí širokou škálu elektronických zařízení pro řízení směru otáčení elektromotorů:
- Frekvenční měniče
- Softstartéry s reverzní funkcí
- Programovatelné ovladače
- Mikroprocesorové řídicí systémy
Elektronické metody mají řadu výhod, včetně schopnosti plynule měnit směr otáčení, což snižuje mechanické namáhání motoru a zařízení, které pohání.
Výpočty a technické parametry
Při návrhu systémů s reverzibilním řízením elektromotorů je nutné zohlednit řadu technických parametrů.
Výpočet doby obrácení
Doba reverzace elektromotoru závisí na jeho setrvačných charakteristikách a zatížení. Přibližný výpočet lze provést pomocí vzorce:
- třev — čas zpětného chodu (s)
- J — moment setrvačnosti systému (kg m²)
- ω — úhlová rychlost otáčení (rad/s)
- Mženatý — průměrný brzdný moment (Nm)
Tabulka typických časů reverzace pro různé výkony motorů
| Výkon motoru, kW | Doba zpětného chodu bez zátěže, s | Doba zpětného chodu při jmenovitém zatížení, s |
|---|---|---|
| 0.37 | 0.2 – 0.3 | 0.4 – 0.6 |
| 0.75 | 0.3 – 0.5 | 0.6 – 0.9 |
| 1.5 | 0.4 – 0.7 | 0.8 – 1.2 |
| 2.2 | 0.5 – 0.9 | 1.0 – 1.5 |
| 4.0 | 0.8 – 1.3 | 1.5 – 2.2 |
| 7.5 | 1.2 – 1.8 | 2.0 – 3.0 |
| 11.0 | 1.5 – 2.3 | 2.5 – 3.8 |
| 15.0 | 2.0 – 3.0 | 3.0 – 4.5 |
Uvedené hodnoty jsou přibližné a mohou se lišit v závislosti na konkrétním typu motoru, provozních podmínkách a charakteristikách zatížení.
Vliv frekvence reverzací na životnost elektromotoru
Časté reverzace mohou mít významný vliv na životnost elektromotoru. Každá reverzace způsobuje zvýšené elektrodynamické a tepelné zatížení vinutí, stejně jako mechanické zatížení ložisek a dalších konstrukčních prvků.
| Počet reverzů za hodinu | Koeficient redukce zdrojů | Doporučená opatření |
|---|---|---|
| 1.0 | Standardní údržba | |
| 5 – 20 | 0.9 | Zvýšená frekvence údržby |
| 20 – 50 | 0.8 | Aplikace vysoce spolehlivých motorů |
| 50 – 100 | 0.7 | Speciální reverzibilní motory |
| > 100 | 0.5 – 0.6 | Aplikace speciálních řídicích a chladicích systémů |
Bezpečnost při změně směru otáčení
Při práci s elektromotory a změně směru jejich otáčení je nutné dodržovat řadu bezpečnostních opatření.
Varování! Veškeré práce na změně směru otáčení elektromotoru smí provádět pouze kvalifikovaný personál s příslušnými povoleními a autorizacemi.
Základní bezpečnostní opatření:
- Před zahájením práce vypněte napájení a ujistěte se, že není pod napětím.
- Používejte dielektrické rukavice a nástroje s izolovanými rukojeťmi.
- Po výměně obvodu zkontrolujte spolehlivost všech elektrických připojení.
- Při prvním spuštění po změně směru otáčení se ujistěte, že se v blízkosti nenacházejí žádné osoby ani překážky.
- Sledujte úroveň vibrací a teplotu motoru po změně směru otáčení
- Zdokumentujte všechny změny ve schématu zapojení.
Speciální případy a typy elektromotorů
Různé typy elektromotorů mají své vlastní charakteristiky při změně směru otáčení.
Elektromotory s vestavěnou brzdou
Motory s vestavěnou brzdou vyžadují zvláštní pozornost při změně směru otáčení. Takové motory mají obvykle speciální obvod řízení brzdy, který musí být koordinován s logikou reverzace. Jak změnit směr otáčení elektromotoru s vestavěnou brzdou? Je nutné zajistit správnou posloupnost operací: nejprve uvolnit brzdu, poté reverzaci a teprve poté znovu spustit.
Elektromotory odolné proti výbuchu
Elektromotory v nevýbušném provedení mají speciální konstrukci, která zajišťuje bezpečný provoz ve výbušném prostředí. Změna směru otáčení těchto motorů musí být provedena v souladu se všemi požadavky regulačních dokumentů o bezpečnosti výbuchu. Je důležité používat pouze zařízení a řídicí obvody povolené pro tuto zónu.
Jeřábové motory
Jeřábové elektromotory pracují za podmínek častého spouštění, zastavování a reverzace. Mají zesílenou konstrukci ložiskových jednotek a zvýšenou mechanickou pevnost. Jak změnit směr otáčení jeřábových elektromotorů? Obvykle se používají speciální reverzibilní regulátory nebo regulátory s povelovým řízením, které zajišťují potřebnou sekvenci spínání.
Typy elektromotorů a jejich vlastnosti
Trh nabízí širokou škálu elektromotorů různých typů a účelů. Společnost “Inner Engineering” nabízí kompletní sortiment elektromotorů pro průmyslové i speciální aplikace.
Katalog elektromotorů
- Elektromotory – Kompletní katalog elektromotorů různých typů a účelů
- Elektromotory v nevýbušném provedení – Motory pro provoz ve výbušném prostředí
- Elektromotory dle evropské normy DIN – shoda s mezinárodními normami kvality
- Jeřábové elektromotory – pro zdvihací a přepravní zařízení
- Elektromotory Všeobecná průmyslová norma GOST – Shoda s domácími normami
- Elektromotory jednofázové 220V – pro domácí a malé průmyslové použití
- Elektromotory s vestavěnou brzdou – Pro přesné polohování a rychlé zastavení
- Elektromotory SSSR – Spolehlivé klasické motory pro náhradu ve stávajících zařízeních
- Elektromotory s krytím IP23 – Pro zvláštní provozní podmínky
- Elektromotory a zdvihací zařízení – Specializovaná řešení pro zdvihací zařízení
Správná volba elektromotoru a schématu řízení směru otáčení přímo ovlivňuje účinnost a spolehlivost celého systému. Při výběru zařízení se doporučuje kontaktovat specialisty, kteří pomohou určit optimální řešení pro konkrétní úkol.
Praktická doporučení pro výběr reverzních metod
Volba metody pro změnu směru otáčení elektromotoru závisí na mnoha faktorech:
- Typ a výkon motoru
- Reverzní frekvence
- Povaha nákladu
- Požadavky na dynamické vlastnosti
- Operační podmínky
Pro vzácné reverzace v jednoduchých zařízeních může stačit ruční přepínání. U složitějších systémů je vhodné použít automatizovaná řešení založená na magnetických spouštěčích nebo elektronických měničích.
Při výběru metody reverzace je důležité zvážit nejen technické, ale i ekonomické aspekty. Složitější systémy poskytují větší funkčnost, ale vyžadují vyšší náklady na pořízení a údržbu.
Pro optimální řešení problému změny směru otáčení elektromotoru je důležité komplexně přistupovat k analýze všech faktorů a provozních podmínek. Specialisté společnosti Inner Engineering jsou připraveni poskytnout odborné poradenství při výběru vhodného zařízení a metod pro řízení směru otáčení elektromotorů pro jakoukoli aplikaci.
dementi
Tento článek slouží pouze pro informační účely. Práce na změně směru otáčení elektromotorů musí být prováděny kvalifikovanými odborníky v souladu se všemi normami a předpisy pro elektrickou bezpečnost. Autor ani společnost „Inner Engineering“ nenesou odpovědnost za možné důsledky použití poskytnutých informací bez řádné kvalifikace a dodržování bezpečnostních opatření.
zdroje
- GOST R 52776-2007 „Točivé elektrické stroje. Jmenovité údaje a charakteristiky“
- Pravidla pro elektroinstalaci (PUE), 7. vydání
- Katsman M.M. „Elektrické stroje“, 2018
- Voldek A.I., Popov V.V. „Elektrické stroje. Stroje na střídavý proud“, 2017
- Technická dokumentace výrobců elektromotorů
Kupte si elektromotory za výhodnou cenu
Společnost Inner Engineering nabízí širokou škálu elektromotorů. Vyberte si komponenty, které potřebujete pro svůj projekt, a zakupte si je u nás se zárukou kvality a spolehlivým dodáním.
© 2025 Společnost Inner Engineering. Všechna práva vyhrazena.
Stejnosměrné elektrické stroje jsou navrženy tak, aby přeměňovaly elektrickou energii na mechanickou a naopak. Zde se projevuje princip reverzibility elektrických strojů: pokud je na svorky přivedeno napětí z externího zdroje proudu, stroj pracuje jako motor; pokud je jeho kotva uvedena do rotace externím mechanickým pohonem, napětí se ze svorek stroje odebírá, tj. pracuje jako generátor. Proto se v prvním případě nazývají motor a ve druhém případě generátor. Generátor stejnosměrného proudu se svou konstrukcí neliší od motoru.
Дополнительно по теме
Princip činnosti generátoru
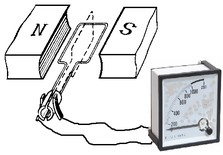 V rámu rotujícím v konstantním magnetickém poli je buděn střídavý proud; v důsledku toho je střídavý proud buděn i ve vinutí kotvy. Ten je pomocí kolektoru přeměněn na stejnosměrný proud. Základní schéma tohoto procesu je znázorněno na obrázku. Jak je vidět, při otočení rámu o 180° se elektromotorické síla indukce uvnitř rámu změní znaménko. Zároveň se však o 180° otočí i půlkruhy, v důsledku čehož se polarita kartáčů nezmění. V obvodu vzniká pulzující proud jednoho směru i(t).
V rámu rotujícím v konstantním magnetickém poli je buděn střídavý proud; v důsledku toho je střídavý proud buděn i ve vinutí kotvy. Ten je pomocí kolektoru přeměněn na stejnosměrný proud. Základní schéma tohoto procesu je znázorněno na obrázku. Jak je vidět, při otočení rámu o 180° se elektromotorické síla indukce uvnitř rámu změní znaménko. Zároveň se však o 180° otočí i půlkruhy, v důsledku čehož se polarita kartáčů nezmění. V obvodu vzniká pulzující proud jednoho směru i(t). 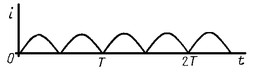 Pokud se na kotvu umístí další vinutí, jak je na obrázku znázorněno tečkovanou čarou, pak se pulzace napětí ve vnějším obvodu vyhladí a proud bude téměř konstantní. V reálném generátoru obsahuje vinutí kotvy několik desítek závitů připojených podle určitého schématu k vícelamelovému kolektoru sestávajícímu ze stejného počtu desek. V tomto případě jsou pulzace proudu naprosto nevýznamné a ve vnějším obvodu protéká konstantní proud.
Pokud se na kotvu umístí další vinutí, jak je na obrázku znázorněno tečkovanou čarou, pak se pulzace napětí ve vnějším obvodu vyhladí a proud bude téměř konstantní. V reálném generátoru obsahuje vinutí kotvy několik desítek závitů připojených podle určitého schématu k vícelamelovému kolektoru sestávajícímu ze stejného počtu desek. V tomto případě jsou pulzace proudu naprosto nevýznamné a ve vnějším obvodu protéká konstantní proud.
Princip činnosti elektromotoru
Vodič, kterým protéká proud, umístěný v magnetickém poli je vystaven síle zvané Ampérova síla. V důsledku přítomnosti Ampérovy síly je krouticí moment působící na rám úměrný proudu v rámu, jeho rozměrům, indukci magnetického pole, ve kterém se otáčí, a závisí na úhlu natočení rámu.
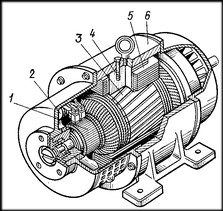
Tato vlastnost rámu se využívá u elektromotorů, které přeměňují energii elektrického proudu na mechanickou energii. U stejnosměrných technických strojů jsou rámy umístěny v drážkách válce sestaveného z plechů ocelového plechu, nazývaného kotva 3 stroje. Začátky a konce rámů jsou připájeny k izolovaným deskám širokého měděného prstence rozřezaného na kusy, nazývaného kolektor 1. Kolektor je upevněn na společné ose s kotvou. Pomocí uhlíkových tyčí – “kartáčů” 2, které se dotýkají kolektorových desek, jsou konce rámů připojeny k vnějšímu obvodu. Magnetické pole, ve kterém se kotva otáčí, je vytvářeno proudem protékajícím budicím vinutím induktoru, sestávajícího z jádra 4 a budicího vinutí 5. Induktor je upevněn na rámu stroje 6.
Provozní režimy generátoru
Generátor má tři provozní režimy: nezávislé buzení (budící vinutí je napájeno ze samostatného zdroje napětí); samobuzení (budící vinutí je zapojeno paralelně s kotvou); smíšené buzení (pokud jsou k dispozici dvě budicí vinutí – sériové a paralelní). Obrázek znázorňuje charakteristiky závislostí napětí kotvy na proudu odpovídající těmto provozním režimům generátoru.
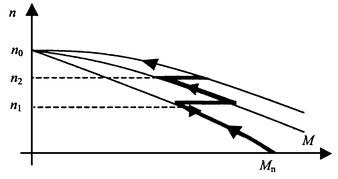
Otáčky motoru lze regulovat třemi způsoby: změnou napětí, magnetického toku (platí pouze pro motory s paralelním a smíšeným buzením) a přídavným odporem v obvodu kotvy.
Nejúspornějším způsobem je regulace napětí na kotevních svorkách.
V okamžiku spuštění je elektromotorická síla kotvy nulová Iп=Uя/Rя, což je 10–30krát větší než jmenovitý proud. Proto se pro omezení proudu během spouštění do obvodu kotvy přidává další odpor, nazývaný spouštěcí odpor. Protože proud se zvyšující se rychlostí snižuje, používá se jako spouštěcí odpor nastavitelný reostat s několika stupni.
Startování motoru reostatem
Směr otáčení motoru lze změnit přepnutím polarity kotvy nebo budicího vinutí.
Otáčky motoru lze zvýšit nad jmenovitou hodnotu oslabením magnetického toku; regulační zóna je omezena zvýšením budicího proudu.
Vlastnosti a charakteristiky stejnosměrných motorů významně závisí na tom, jak se mění magnetický tok při změně mechanického zatížení motorů. Povaha magnetického toku je určena metodou buzení.
U stejnosměrných strojů existují čtyři budicí systémy:
- paralelní nebo zkratový;
- sekvenční nebo sériové;
- smíšené nebo složeniny;
- nezávislý.
Sériově buzené motory mají vysoký rozběhový moment, tj. moment v okamžiku rozběhu, kdy je rychlost otáčení kotvy nulová. Díky tomu jsou nepostradatelné ve všech druzích elektrické dopravy, kde je při rozjezdu z místa vyžadována velká tažná síla. Rychlost otáčení kotvy sériově buzeného motoru se však při změně zatížení prudce mění, což je v některých případech nežádoucí.
U motorů s paralelním buzením nezávisí rychlost otáčení kotvy v širokých mezích na zatížení a lze ji plynule regulovat změnou síly proudu v budicím vinutí, čehož se dosahuje regulačním reostatem. Tato vlastnost motorů s paralelním buzením určuje oblast jejich použití jako elektrického pohonu pro všechny druhy strojů a jednotek, kde je vyžadována plynulá regulace rychlosti otáčení a není potřeba velký rozběhový moment.
U stejnosměrných strojů se rozlišují následující hlavní typy ztrát:
- ztráty výkonu v obvodu kotvy nebo proměnné ztráty v závislosti na zatížení;
- ztráty výkonu v oceli;
- mechanické ztráty;
- ztráty výkonu v budicích obvodech.
Když stroj běží na volnoběh, je užitečný výkon a tedy i účinnost nulová.
Vnější charakteristika generátoru Uя=f(Iя)