Základní informace o frekvenčním měniči
Frekvenční měnič s asynchronním elektromotorem umožňuje nahradit stejnosměrný elektrický pohon. Systémy regulace otáček stejnosměrného motoru jsou poměrně jednoduché, ale slabinou takového elektrického pohonu je elektromotor. Je drahý a nespolehlivý. Během provozu dochází k jiskření kartáčů a opotřebení kolektoru vlivem elektrické eroze. Takový elektromotor nelze použít v prašném a výbušném prostředí.
Asynchronní elektromotory jsou v mnoha ohledech lepší než stejnosměrné motory: mají jednoduchou konstrukci a jsou spolehlivé, protože nemají žádné pohyblivé kontakty. Ve srovnání se stejnosměrnými motory se stejným výkonem jsou menší co do velikosti, hmotnosti a nákladů. Asynchronní motory se snadno vyrábějí a obsluhují.
Hlavní nevýhodou asynchronních elektromotorů je obtížnost regulace jejich otáček tradičními metodami (změna napájecího napětí, zavedení dodatečného odporu do obvodu vinutí). Řízení asynchronního elektromotoru ve frekvenčním režimu bylo až donedávna velkým problémem, ačkoli teorie frekvenční regulace byla vyvinuta již ve třicátých letech. Vývoj frekvenčně řízených elektrických pohonů byl brzděn vysokou cenou frekvenčních měničů. Příchod výkonových obvodů s IGBT tranzistory a vývoj vysoce výkonných mikroprocesorových řídicích systémů umožnily různým společnostem v Evropě, USA a Japonsku vytvářet moderní frekvenční měniče za dostupnou cenu.
Je známo, že regulace frekvence otáčení aktuátorů může být provedena pomocí různých zařízení: mechanických variátorů, hydraulických spojek, rezistorů dodatečně zavedených do statoru nebo rotoru, elektromechanických měničů kmitočtu, statických měničů kmitočtu.
Použití prvních čtyř zařízení neposkytuje vysoce kvalitní regulaci otáček, je neekonomické a vyžaduje vysoké náklady na instalaci a provoz. Statické měniče kmitočtu jsou v současnosti nejpokročilejšími zařízeními pro řízení asynchronních pohonů.
Princip frekvenční metody regulace otáček asynchronního motoru spočívá v tom, že změnou frekvence napájecího napětí f1 je možné v souladu s výrazem
změnit úhlovou rychlost magnetického pole statoru se stejným počtem pólových párů p.
Tato metoda poskytuje plynulou regulaci rychlosti v širokém rozsahu a mechanické vlastnosti jsou vysoce tuhé.
Regulace otáček není doprovázena zvýšením skluzu asynchronního motoru, takže ztráty výkonu během regulace jsou malé. Pro dosažení vysokých energetických ukazatelů asynchronního motoru – účiníků, účinnosti, přetížitelnosti – je nutné měnit dodávané napětí současně s frekvencí.
Zákon změny napětí závisí na povaze zatěžovacího momentu Mс. Při konstantním zatěžovacím momentu Mс=const by mělo být napětí na statoru regulováno úměrně frekvenci:
Pro zatěžovací moment vějířového typu má tento stav tvar:
Když je moment zatížení nepřímo úměrný rychlosti:
Pro plynulou a plynulou regulaci frekvence otáčení hřídele asynchronního elektromotoru musí tedy frekvenční měnič zajišťovat současnou regulaci frekvence a napětí na statoru asynchronního motoru.
Výhody použití pohonu s proměnnou rychlostí v technologických procesech
Použití nastavitelného elektrického pohonu zajišťuje úsporu energie a umožňuje dosáhnout nových kvalit systémů a objektů. Významných úspor energie se dosahuje regulací jakéhokoli technologického parametru. Pokud se jedná o dopravník nebo dopravník, lze regulovat jeho rychlost. Pokud se jedná o čerpadlo nebo ventilátor, lze udržovat tlak nebo regulovat produktivitu. Pokud se jedná o stroj, lze plynule regulovat rychlost posuvu nebo hlavního pohybu.
Zvláštní ekonomický efekt z použití frekvenčních měničů je zajištěn použitím frekvenční regulace v zařízeních, která zajišťují přepravu kapalin. Doposud bylo nejběžnějším způsobem regulace produktivity takových zařízení použití ventilů nebo regulačních ventilů, ale dnes se stává dostupnou frekvenční regulace asynchronního motoru, který pohání například oběžné kolo čerpací jednotky nebo ventilátoru.
Perspektivy regulace frekvence jsou jasně patrné z obrázku 1.
Při škrcení tedy tok látky, zadržovaný šoupátkem nebo ventilem, nevykonává užitečnou práci. Použití nastavitelného elektrického pohonu čerpadla nebo ventilátoru umožňuje nastavit požadovaný tlak nebo průtok, což nejen ušetří elektřinu, ale také sníží ztráty přepravované látky.
Struktura frekvenčního měniče
Většina moderních frekvenčních měničů je postavena pomocí schématu dvojité konverze. Skládají se z těchto hlavních částí: stejnosměrný meziobvod (neřízený usměrňovač), výkonový pulzní střídač a řídicí systém.
Stejnosměrný meziobvod se skládá z neřízeného usměrňovače a filtru. Střídavé napětí napájecí sítě se převádí na stejnosměrné napětí. Třífázový pulzní měnič výkonu se skládá ze šesti tranzistorových klíčů. Každé vinutí elektromotoru je připojeno přes odpovídající klíč ke kladnému a zápornému pólu usměrňovače. Měnič převádí usměrněné napětí na třífázové střídavé napětí požadované frekvence a amplitudy, které je přivedeno na statorová vinutí elektromotoru.
Ve výstupních stupních měniče se jako klíče používají výkonové IGBT tranzistory. Ve srovnání s tyristory mají vyšší spínací frekvenci, což umožňuje generovat sinusový výstupní signál s minimálním zkreslením.
Princip činnosti frekvenčního měniče
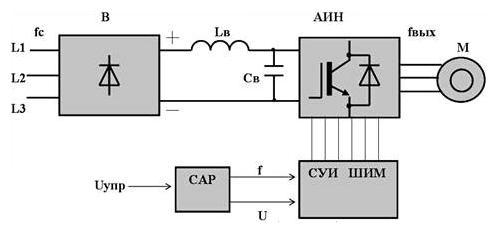
Frekvenční měnič se skládá z neřízeného diodového usměrňovače B, autonomního střídače, PWM regulačního systému, automatického regulačního systému, tlumivky Lв a filtračního kondenzátoru Св (obr. 2). Výstupní kmitočet fout. a napětí Uout jsou v měniči regulovány vysokofrekvenčním pulzně šířkovým řízením.
Řízení šířky impulzů je charakterizováno modulační periodou, během níž je statorové vinutí elektromotoru střídavě připojeno ke kladnému a zápornému pólu usměrňovače.
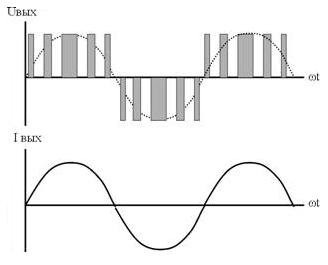
Trvání těchto stavů v rámci periody PWM je modulováno podle sinusového zákona. Při vysokých (obvykle 2. 15 kHz) frekvencích hodin PWM protékají vinutími motoru sinusové proudy díky jejich filtračním vlastnostem.
Tvar křivky výstupního napětí je tedy vysokofrekvenční bipolární sekvence obdélníkových impulzů (obr. 3). Frekvence impulzů je určena frekvencí PWM, doba trvání (šířka) impulzů během periody výstupní frekvence AIM je modulována podle sinusového zákona. Tvar křivky výstupního proudu (proud ve vinutích asynchronního elektromotoru) je prakticky sinusový.
Regulaci výstupního napětí měniče lze realizovat dvěma způsoby: amplitudovou regulací (AR) změnou vstupního napětí Uв a pulzně šířkovou regulací (PWM) změnou spínacího programu ventilů V1-V6, když Uв = const.
Druhá metoda se v moderních frekvenčních měničích rozšířila díky vývoji moderní elementární základny (mikroprocesory, IBGT tranzistory). Při pulzně šířkové modulaci se tvar proudů ve statorových vinutích asynchronního motoru blíží sinusovému tvaru díky filtračním vlastnostem samotných vinutí.
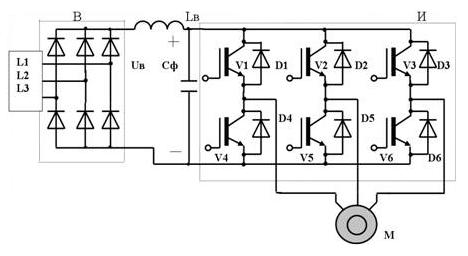
Toto řízení umožňuje dosáhnout vysoké účinnosti měniče a je ekvivalentní analogovému řízení pomocí frekvence a amplitudy napětí. Moderní měniče jsou založeny na plně řízených výkonových polovodičových součástkách – blokovacích GTO – tyristorech nebo bipolárních IGBT tranzistorech s izolovanou hradlem. Obr. 2.45 znázorňuje třífázový můstkový obvod autonomního měniče na IGBT tranzistorech.
Skládá se ze vstupního kapacitního filtru Cф a šesti IGBT tranzistorů V1-V6 zapojených antiparalelně s diodami pro zpětný proud D1-D6.
Střídavým přepínáním ventilů V1-V6 podle algoritmu určeného řídicím systémem se konstantní vstupní napětí Uв převádí na střídavé výstupní napětí s obdélníkovými impulzy. Aktivní složka proudu asynchronního elektromotoru protéká řízenými klíči V1-V6 a reaktivní složka proudu protéká diodami D1-D6.
I – třífázový můstkový střídač;
B – třífázový můstkový usměrňovač;
Sf – filtrační kondenzátor;
Vytvořte si na webu přihlášku, co nejdříve vás budeme kontaktovat a zodpovíme všechny vaše dotazy.